![]() 分布式能源
分布式能源
![]() 分布式能源
分布式能源
項(xiàng)目背景
需求響應(yīng)是電力需求側(cè)管理在電力市場(chǎng)中的最新發(fā)展。根據(jù)美國(guó)能源部的研究報(bào)告,按照需求(終端用戶)的市場(chǎng)參與行為,電力需求響應(yīng)項(xiàng)目可以分為以實(shí)時(shí)電價(jià)、峰谷電價(jià)等為引導(dǎo)的基于價(jià)格和根據(jù)系統(tǒng)需要或電力緊張時(shí)減少電力需求以此獲得直接補(bǔ)償或其他時(shí)段的優(yōu)惠電價(jià)的基于激勵(lì)兩類。目前針對(duì)需求響應(yīng)的研究主要以激勵(lì)用戶參與電網(wǎng)調(diào)峰和引導(dǎo)用戶科學(xué)、合理用電為目的。傳統(tǒng)的需求響應(yīng)為不影響普通用戶的正常使用,在協(xié)議中都會(huì)對(duì)控制的響應(yīng)次數(shù)、頻率、總時(shí)間等予以限制。因此往往只能在分鐘/小時(shí)級(jí)別的調(diào)峰控制中發(fā)揮作用,而對(duì)秒級(jí)的頻率控制則無(wú)能為力。隨著電動(dòng)汽車等大規(guī)模儲(chǔ)能可控負(fù)荷的出現(xiàn),該類負(fù)荷參與響應(yīng)的控制次數(shù)、頻率、總時(shí)間等方面的限制將變得寬松,將可以滿足參與響應(yīng)頻率控制的需要。因此,提出可將需求響應(yīng)的定義延伸至根據(jù)系統(tǒng)需要或間歇性電源沖擊時(shí)用戶參與頻率控制以此獲得直接補(bǔ)償或其他時(shí)段的優(yōu)惠電價(jià)。從而,將調(diào)峰和調(diào)頻控制均納入需求響應(yīng)的范疇。
目前對(duì)可控負(fù)荷的研究均以用戶可控負(fù)荷為主,而且一般以大電網(wǎng)理想條件作為背景,同時(shí)認(rèn)為有足夠的可控負(fù)荷參與電網(wǎng)的運(yùn)行控制,為此,微電網(wǎng)需要在需求響應(yīng)中有可控空間更高的負(fù)荷出現(xiàn),對(duì)這類負(fù)荷,電網(wǎng)擁有完全自主的調(diào)控權(quán)。同時(shí)對(duì)電動(dòng)汽車參與電網(wǎng)頻率調(diào)節(jié)需要有更加經(jīng)濟(jì)的運(yùn)行控制策略以克服蓄電池造價(jià)過(guò)高的缺點(diǎn),提高微電網(wǎng)的經(jīng)濟(jì)性。
現(xiàn)實(shí)可行性分析
傳統(tǒng)的需求響應(yīng)技術(shù)主要針對(duì)具體的管理對(duì)象、生活習(xí)慣和生產(chǎn)工藝的特點(diǎn),以節(jié)能技術(shù)為主實(shí)現(xiàn)避開(kāi)電力需求高峰的功能。隨著智能電網(wǎng)技術(shù)的發(fā)展,需求響應(yīng)有了新的意義,包括自動(dòng)需求側(cè)響應(yīng)技術(shù)、智能有序用電等,使得需求側(cè)可控負(fù)荷可以迅速參與電網(wǎng)運(yùn)行控制,為提升電力系統(tǒng)穩(wěn)定性提供了技術(shù)可能。
面向用戶的這一新技術(shù)依然存在諸多不足之處,為此,提出將需求響應(yīng)按負(fù)荷所有權(quán)分為用戶需求響應(yīng)和電網(wǎng)需求響應(yīng),用戶需求響應(yīng)即為傳統(tǒng)意義的需求響應(yīng),對(duì)應(yīng)用戶參與調(diào)節(jié)的可控負(fù)荷,該負(fù)荷由用戶和電網(wǎng)協(xié)調(diào)控制稱為普通可控負(fù)荷。而電網(wǎng)需求響應(yīng)則是對(duì)應(yīng)由電網(wǎng)運(yùn)營(yíng)公司直接運(yùn)營(yíng)管理的可控負(fù)荷,該負(fù)荷具有高度的可控空間,電網(wǎng)運(yùn)行部門對(duì)其擁有完全自主的控制權(quán),屬于高度可控負(fù)荷。電動(dòng)汽車充電站則為電網(wǎng)需求響應(yīng)提供了現(xiàn)實(shí)可行的運(yùn)營(yíng)對(duì)象,電網(wǎng)企業(yè)作為電能的批發(fā)和零售單位,同時(shí)銷售通過(guò)蓄電池等儲(chǔ)能介質(zhì)儲(chǔ)存好的電能亦與其業(yè)務(wù)保持了一致性。當(dāng)由電網(wǎng)公司統(tǒng)一運(yùn)營(yíng)時(shí),經(jīng)濟(jì)補(bǔ)償亦可以用運(yùn)營(yíng)業(yè)績(jī)補(bǔ)償來(lái)代替。同時(shí),電動(dòng)汽車充電站不僅可以為電網(wǎng)企業(yè)維持微網(wǎng)穩(wěn)定提供良好的支撐,而且有利于電動(dòng)汽車充電設(shè)備產(chǎn)生諧波的集中治理,電動(dòng)汽車作為用戶需求響應(yīng)的普通可控對(duì)象雖然具有一定的調(diào)節(jié)能力,但用戶的用車習(xí)慣依然具有一定的隨機(jī)性,大規(guī)模電動(dòng)汽車隨機(jī)性接入、退出調(diào)節(jié)都將給電網(wǎng)帶來(lái)一定的沖擊。電動(dòng)汽車充電站受電網(wǎng)內(nèi)部運(yùn)行網(wǎng)絡(luò)控制,不像作為用戶需求響應(yīng)的電動(dòng)汽車那樣存在針對(duì)用戶的外部網(wǎng)絡(luò)接口,其網(wǎng)絡(luò)安全性大大提高。這些優(yōu)勢(shì)都為電動(dòng)汽車充電站作為電網(wǎng)需求響應(yīng)的高度可控負(fù)荷出現(xiàn)提供了現(xiàn)實(shí)可能。
電動(dòng)汽車作為分布式電源,其服務(wù)對(duì)象為電網(wǎng)公司,在此過(guò)程中,將根據(jù)電網(wǎng)運(yùn)行情況對(duì)電池進(jìn)行不斷的充放電,其消耗的電動(dòng)汽車電池壽命將由電網(wǎng)公司承擔(dān)。美國(guó)特立華大學(xué)Kempton教授在2007年對(duì)提出的V2G模型將一輛ACPropulsionEbox(豐田Scion改裝車)作為分布式電源接入電網(wǎng),經(jīng)測(cè)算每車每年可以為電網(wǎng)帶來(lái)大約4000$的效益。但該效益中并未包括電網(wǎng)對(duì)消耗電動(dòng)汽車電池所負(fù)擔(dān)的代價(jià)。考慮到目前電動(dòng)汽車高昂的造價(jià),儲(chǔ)能裝置作為分布式電源接入電網(wǎng)的性價(jià)比依然不樂(lè)觀。目前,仍需研究技術(shù)可靠、成本低廉的滿足V2G商業(yè)化運(yùn)行的設(shè)備。而電動(dòng)汽車充電站作為高度可控負(fù)荷,其服務(wù)對(duì)象為用戶,將由其對(duì)應(yīng)的商業(yè)需求為電池造價(jià)買單。作為負(fù)荷則只需在充電單一模式下運(yùn)營(yíng),將負(fù)荷來(lái)等效為電源的負(fù)作用,降低了運(yùn)行控制的難度。而且電池在充放電狀態(tài)之間過(guò)于頻繁的切換將嚴(yán)重影響電池的壽命。因此,將電動(dòng)汽車作為可控負(fù)荷參與電網(wǎng)的頻率控制將更具經(jīng)濟(jì)實(shí)用性。
技術(shù)手段模型
傳統(tǒng)的電動(dòng)汽車控制方法是通過(guò)控制正弦脈寬調(diào)制器(SPWM)來(lái)控制充電電流,進(jìn)而對(duì)充電功率進(jìn)行控制,SPWM實(shí)際上就是一個(gè)交直流可控的四象限變流器。但這種方式將強(qiáng)制電動(dòng)汽車的充電電流隨電網(wǎng)運(yùn)行情況而變化。這對(duì)于充電電池的壽命和充電能耗都是不利的。
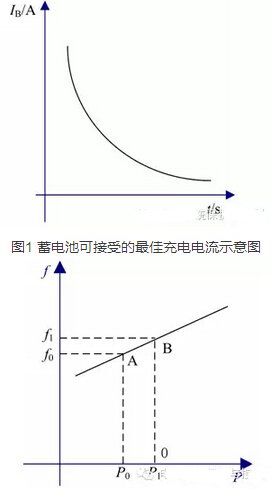
如圖1所示,IB為充電電流。大量的實(shí)驗(yàn)證明,在整個(gè)充電過(guò)程中,若能使實(shí)際充電電流始終等于或接近蓄電池可接受的最佳充電電流,則可大大縮短充電時(shí)間,并且蓄電池內(nèi)部的副反應(yīng)可以控制在很低的范圍內(nèi)。因此,通過(guò)控制接入電網(wǎng)的充電電池的規(guī)模比控制電池充電電流來(lái)控制電動(dòng)汽車充電站的吸收功率更具有經(jīng)濟(jì)性,更符合其商業(yè)運(yùn)營(yíng)的特點(diǎn)。
對(duì)電動(dòng)汽車充電站采用負(fù)荷Droop控制。Droop控制是模擬發(fā)電機(jī)組工頻特性的一種方法,其對(duì)應(yīng)負(fù)荷控制的原理圖如圖2所示。
Droop控制可根據(jù)相應(yīng)的Droop特性系數(shù)自動(dòng)分配各電動(dòng)汽車充電的有功吸收。控制系統(tǒng)不需要過(guò)多的通信支持,電動(dòng)汽車充電站參與頻率調(diào)節(jié)最大的特點(diǎn)就是其不需要克服電機(jī)的旋轉(zhuǎn)慣性,可以快速響應(yīng)電網(wǎng)的波動(dòng),迅速將微電網(wǎng)較大的頻率波動(dòng)控制在比較低的范圍內(nèi),然后由微網(wǎng)的調(diào)頻機(jī)完成二次調(diào)頻任務(wù)。同時(shí)為防止電動(dòng)汽車在基準(zhǔn)運(yùn)行點(diǎn)附近頻繁的投退,應(yīng)設(shè)置一個(gè)死區(qū),即電動(dòng)汽車充電站不響應(yīng)微網(wǎng)的微小頻率波動(dòng)。這樣,該控制策略能對(duì)延長(zhǎng)蓄電池壽命起到積極的作用。
該系統(tǒng)詳細(xì)的控制流程圖如圖3所示。該系統(tǒng)采用數(shù)字離散控制,首先由數(shù)字電壓表采集到離散的母線電壓信號(hào)Vabc,然后由0階保持器對(duì)采集信號(hào)進(jìn)行保持,由離散三相鎖相環(huán)提取出系統(tǒng)的頻率信號(hào)f,將系統(tǒng)頻率和參考頻率fref對(duì)比得到頻率偏差Δf,由設(shè)置的死區(qū)環(huán)節(jié)對(duì)頻率偏差進(jìn)行判斷微網(wǎng)擾動(dòng)是否屬于微小擾動(dòng),如果不是則將信號(hào)傳遞給Droop控制器處理,由Droop控制器的Droop特性控制電動(dòng)汽車充電站電池的負(fù)荷容量。將該負(fù)荷容量作為功率參考信號(hào)Pref輸入系統(tǒng)的CPU處理器,由CPU處理器根據(jù)各電池的狀態(tài)參數(shù)(包括電池荷電狀態(tài)SOC、電池衰老系數(shù)、電池順序編號(hào)、環(huán)境溫度等)計(jì)算出一組二進(jìn)制開(kāi)關(guān)控制信號(hào),通過(guò)開(kāi)關(guān)信號(hào)的高低電平來(lái)控制執(zhí)行機(jī)構(gòu)對(duì)充電電池進(jìn)行投切。CPU邏輯控制如圖4所示。對(duì)已經(jīng)投入運(yùn)行的蓄電池,采用“恒流—限壓—浮充”三階段充電控制策略,該控制策略可以比較理想地接近蓄電池可接受的最佳充電電流曲線。同時(shí)考慮到電池的非線性特性,在不同階段的充電狀態(tài)下其吸收功率不一樣,將系統(tǒng)的輸出功率作為內(nèi)環(huán)反饋信號(hào)反饋給CPU進(jìn)行功率差值控制。同時(shí),電動(dòng)汽車充電站的分布式電源特性依然不容忽視,其可以在微電網(wǎng)出現(xiàn)較大故障時(shí),提供備用電源支撐。關(guān)于這些內(nèi)容的研究已相當(dāng)多,本文不作分析。對(duì)由于頻率回落退出充電的蓄電池,則用浮充方式以平衡電池自放電,待前面電池完成充電后繼續(xù)充電。
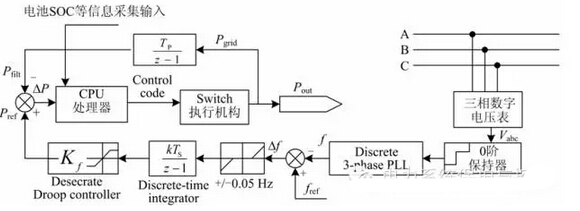
圖3 電動(dòng)汽車充電站電池規(guī)模Droop離散控制圖
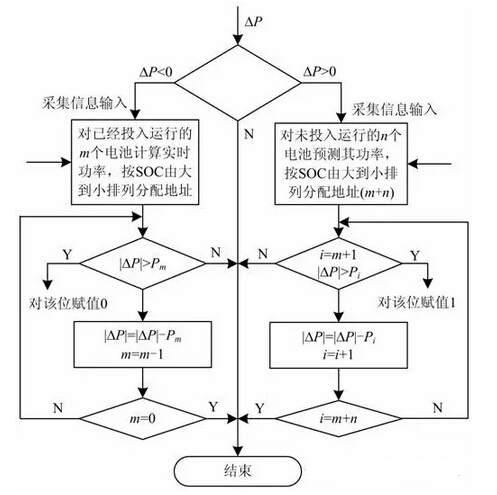
圖4 CPU處理器邏輯控制圖
仿真驗(yàn)證
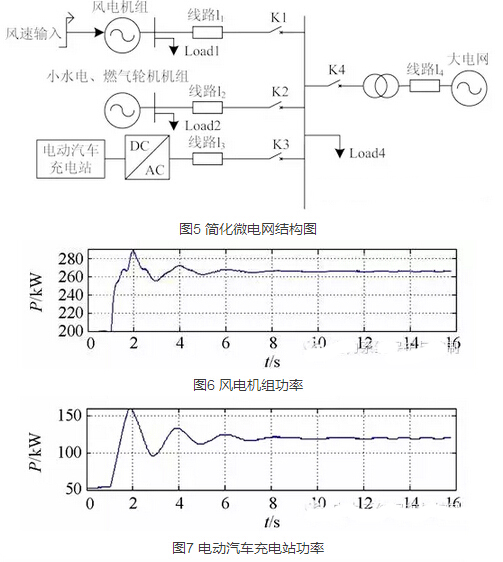
在Matlab/Simulink平臺(tái)搭建的簡(jiǎn)化微網(wǎng)結(jié)構(gòu)圖如圖5所示。為簡(jiǎn)化分析,文中只采用了風(fēng)力發(fā)電機(jī)作為間歇性波動(dòng)功率的輸出電源。對(duì)小型水電機(jī)組、燃?xì)廨啓C(jī)機(jī)組等可控電源等效用同步發(fā)電機(jī)代替。在微網(wǎng)孤島運(yùn)行時(shí),開(kāi)關(guān)K4斷開(kāi)。風(fēng)力發(fā)電機(jī)組容量為300kW,小水電、燃?xì)廨啓C(jī)機(jī)組容量為600kW,間歇性電源的穿透率為33.3%,符合未來(lái)微網(wǎng)間歇性可再生電源高穿透率的趨勢(shì)。微網(wǎng)中負(fù)荷總?cè)萘繛?00kW,電動(dòng)汽車充電站的初始運(yùn)行功率為50kW,單臺(tái)電池在恒電流充電初期功率為1kW。用一個(gè)階躍信號(hào)模擬沖擊最大的陣風(fēng)輸入。在1s時(shí)風(fēng)速由10m/s階躍為11m/s。仿真結(jié)果如圖6~圖8所示。
如仿真結(jié)果所示,在1s時(shí)風(fēng)力發(fā)電機(jī)組有功輸出迅速增加時(shí),電動(dòng)汽車充電站能快速響應(yīng)系統(tǒng)的變化。在不采用電動(dòng)汽車充電站參與調(diào)解的情況下,對(duì)電動(dòng)汽車充電站的初始功率,用一個(gè)50kW的恒定負(fù)荷代替。在0.1s時(shí)風(fēng)速由10m/s階躍為10.3m/s。系統(tǒng)在僅依靠可控同步發(fā)電機(jī)組的調(diào)節(jié)時(shí)頻率變化如圖9所示。
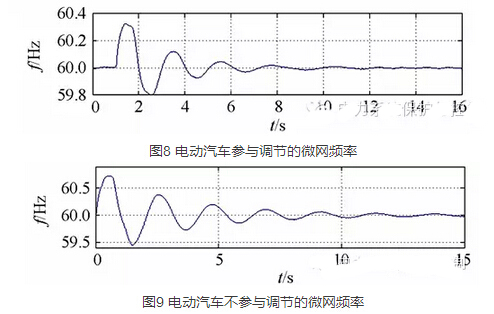
電動(dòng)汽車充電站不參與調(diào)節(jié)時(shí),在間歇性電源沖擊更小的情況小,其調(diào)整時(shí)間和最大超調(diào)量卻明顯大于電動(dòng)汽車參與調(diào)節(jié)時(shí)在更大沖擊時(shí)的情況。仿真結(jié)果驗(yàn)證了電網(wǎng)需求側(cè)高度可控負(fù)荷出色的調(diào)頻性能。
如圖11所示,L1為微網(wǎng)正常并網(wǎng)時(shí)的曲線,在a點(diǎn)運(yùn)行。L2為微網(wǎng)轉(zhuǎn)向孤島運(yùn)行時(shí)的曲線。L3為電動(dòng)汽車充電站參與響應(yīng)下的曲線。由圖可得,在電動(dòng)汽車充電站參與響應(yīng)后加速面積減小,減速面積增大。通過(guò)迅速減小功率差的作用使系統(tǒng)具有更大的暫態(tài)擾動(dòng)極限。在K4斷開(kāi)后,采用電動(dòng)汽車充電站參與響應(yīng)和不參與響應(yīng)的同步發(fā)電機(jī)功角時(shí)間曲線仿真結(jié)果分別如圖12、圖13所示(當(dāng)δ/rad>3.15后認(rèn)為系統(tǒng)已經(jīng)失去同步,仿真立即結(jié)束)。
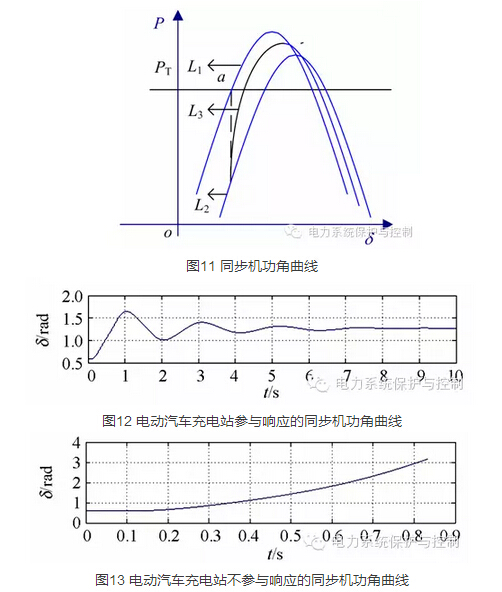
仿真結(jié)果顯示,在電動(dòng)汽車充電站參與系統(tǒng)響應(yīng)時(shí),系統(tǒng)能保持暫態(tài)穩(wěn)定,而不參與時(shí)系統(tǒng)在擾動(dòng)下失去穩(wěn)定。驗(yàn)證了該控制策略在面對(duì)大擾動(dòng)下表現(xiàn)出的良好的穩(wěn)定性。
總結(jié)
電動(dòng)汽車充電站在時(shí)間上的負(fù)荷特性以及其在運(yùn)營(yíng)上與電網(wǎng)的巨大關(guān)聯(lián),其參與電網(wǎng)需求響應(yīng)的約束將變得寬松,使需求響應(yīng)得以能對(duì)秒級(jí)以下的頻率控制發(fā)揮作用,從而將頻率控制納入需求響應(yīng)的范疇。對(duì)此,提出了對(duì)需求響應(yīng)定義的新延伸,并在分類上提出了電網(wǎng)需求響應(yīng)的概念。
針對(duì)傳統(tǒng)用戶需求響應(yīng)在應(yīng)對(duì)微網(wǎng)波動(dòng)時(shí)的不足,利用電動(dòng)汽車充電站在時(shí)間上的靈活性和高度可控性,提出了基于Droop控制的電動(dòng)汽車充電站電池接入規(guī)模控制策略。通過(guò)仿真顯示,該方法可以通過(guò)控制電動(dòng)汽車消耗有功的方式平抑微網(wǎng)的分布式電源波動(dòng)以及微網(wǎng)運(yùn)行狀態(tài)切換過(guò)程中的大擾動(dòng)。可以有效控制微網(wǎng)頻率維持在安全范圍內(nèi),提高微網(wǎng)的抗擾動(dòng)能力使微網(wǎng)表現(xiàn)出更加出色的穩(wěn)定性。
限于篇幅有限,文中只研究了電網(wǎng)需求響應(yīng)的技術(shù)手段。與此配套的經(jīng)濟(jì)引導(dǎo)手段和行政手段還有待共同完善。
責(zé)任編輯: 李穎
關(guān)于我們 | 會(huì)務(wù)服務(wù) | 咨詢服務(wù) | 誠(chéng)聘英才 | 相關(guān)法律 | 會(huì)員注冊(cè) | 網(wǎng)站地圖 | 合作伙伴 | 友情鏈接
Copyright © 1999-2024 北京中能網(wǎng)訊咨詢有限公司 版權(quán)所有. All rights reserved.
地址:北京市海淀區(qū)北蜂窩8號(hào)中雅大廈A座14層 郵政編碼:100038
電話:010-51915010,30 傳真:010-51915237
支持單位: 中國(guó)企業(yè)投資協(xié)會(huì)|中國(guó)動(dòng)力工程學(xué)會(huì)| 中國(guó)電機(jī)工程學(xué)會(huì)|中國(guó)城市燃?xì)鈪f(xié)會(huì) 承辦單位:北京中能網(wǎng)訊咨詢有限公司
 京公網(wǎng)安備 11010802020613號(hào)
京公網(wǎng)安備 11010802020613號(hào)